- Eliminazione o fattorizzazione di Gauss
- Proprietà delle trasformazioni elementari di Gauss
- Unicità della fattorizzazione
- Fallimento dell’algoritmo
- Matrici simmetriche
Si ha sempre il sistema . Il metodo di Gauss si divide in due fasi per la risoluzione:
- Eliminazione o fattorizzazione di Gauss: si estraggono le matrici triangolare inferiore e superiore tali che
- Costruzione e soluzione sistema triangolare equivalente a quello iniziale. Da si ha un sistema
 Questa seconda fase prevede poi due diversi passi, ovvero la soluzione del sistema triangolare inferiore per sostuzione in avanti, e il sistema triangolare superiore per sostuzione all’indietro.
Questa seconda fase prevede poi due diversi passi, ovvero la soluzione del sistema triangolare inferiore per sostuzione in avanti, e il sistema triangolare superiore per sostuzione all’indietro.
Eliminazione o fattorizzazione di Gauss
Ipotesi: A non singolare.
Fattorizzazione di Gauss
Dal momento che , si ha che quindi . Se si indica L con , si ha in definitiva che . L è una matrice triangolare inferiore non singolare, dal momento che è il prodotto di matrici triangolari inferiori non singolari.
Per ogni passo, si ottiene una matrice con partendo da . Il passo quindi ricava una matrice tramite combinazioni lineari delle righe di , in modo che gli elementi sotto la diagonale principale siano nulli.
I passi sono .
Passaggi
Si parte prendendo un elemento come pivot, ad esempio (che deve essere diverso da 0). Si calcolano i moltiplicatori, ovvero i valori che moltiplicati al pivot annullano gli elementi al di sotto. , con Si ha quindi una combinazione lineare tra la riga i e la riga 1, con coefficiente .
Al passo si ha questo.
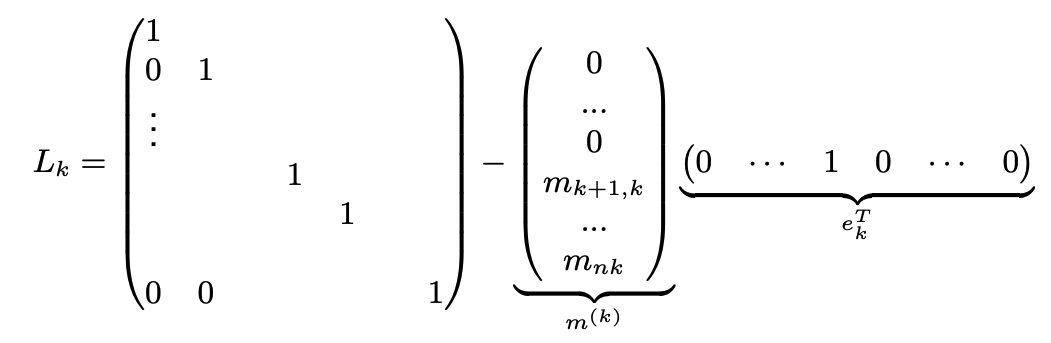
La matrice è detta k-esima trasformazione elementare di Gauss, ed è definita in funzione dei moltiplicatori del k-esimo passo.
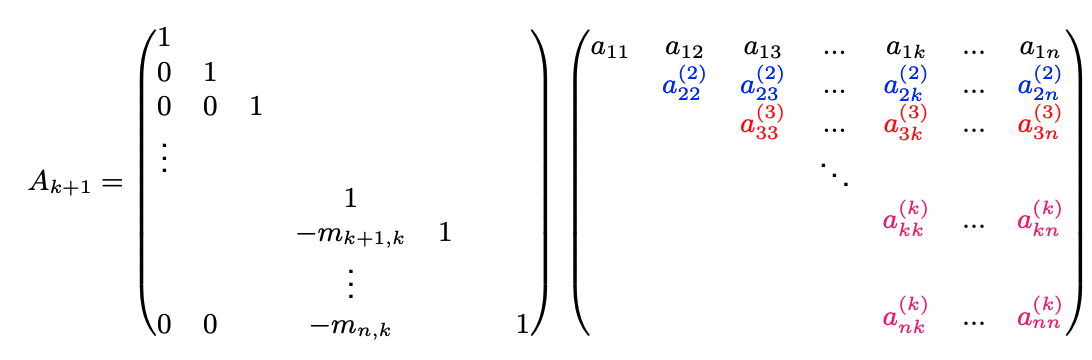
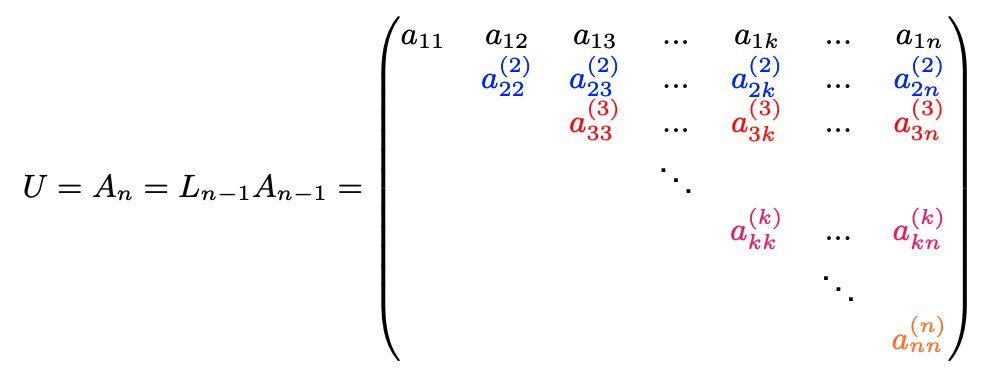
Dopo passi, si rimane con una matrice triangolare superiore .
Il procedimento di eliminazione equivale ad una successione di prodotti matriciali, .
Attenzione
Tutto questo è ben posto se e solo se .
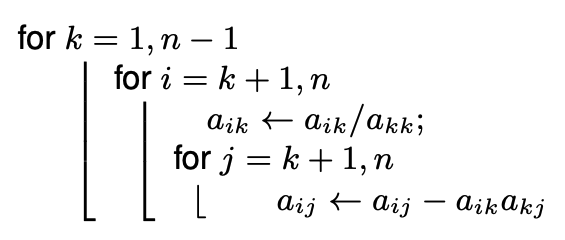
Per aggiornare un elemento, si esegue:
Pseudocodice
Applicato l’algoritmo, si ha una matrice di questo tipo:
Costo
Somme e prodotto: Quozienti:
Proprietà delle trasformazioni elementari di Gauss
è triangolare con diagonale unitaria, quindi il determinante è , quindi la matrice è non singolare.
Si può quindi riassumere con , dove è un vettore dove tutti gli elementi sono 0, a parte l’elemento k. Essendo trasposto, diventa vettore riga.
L’inversa di questa matrice, ovvero , è data da , dove in pratica cambia solo il segno di sottrazione.

Osservazione
Uguaglianza dei determinanti: , dove è il k-esimo minore principale di A, ovvero il determinante della sottomatrice formata delle prime k righe e k colonne.
Condizione necessaria e sufficiente
affinchè tutti i pivot siano non nulli, e quindi si possa compiere la fattorizzazione, è che tutti i minori principali di A siano diversi da zero, eccetto al massimo l’ultimo, ovvero se , si può comunque portare a termine.
Unicità della fattorizzazione
Nell’ipotesi che A sia non singolare, allora è unica.
Dimostrazione
Supponiamo che esistano due coppie e . e sono non singolari. Se è non singolare, allora anche e devono essere non singolari. Quindi si ha che . è triangolare inferiore, e è triangolare superiore. Dal momento che sono eguagliate, si ha che devono essere matrici diagonali. Ma dal momento che ha diagonale unitaria, l’unica soluzione è .
Fallimento dell’algoritmo
Non tutte le matrici invertibili hanno tutti i minori principali diversi da zero (). Per convenire a questi errori, si utilizzano alcune modifiche del metodo di Gauss, come ad esempio:
Matrici simmetriche
Per le matrici simmetriche si utilizza il Fattorizzazione matrici simmetriche. La risoluzione del sistema tramite si fa:
Attenzione
Il vettore si calcola con l’algoritmo di soluzione dei sistemi diagonali:
Matrici simmetriche definite positive
Godono delle seguenti proprietà:
- tutti i minori principali sono positivi
- tutti gli autovalori sono reali positivi
- e